在當今數(shù)字消費時代,家具與家居商品類電商網(wǎng)頁不僅是銷售渠道,更是品牌形象、用戶體驗與消費決策的關鍵載體。優(yōu)秀的網(wǎng)頁設計能瞬間吸引用戶,清晰傳達產品價值,并引導其完成從瀏覽到購買的愉悅旅程。以下是一組設計參考與核心要素解析,旨在為打造卓越家居電商官網(wǎng)提供靈感。
一、視覺風格:奠定品牌基調與氛圍
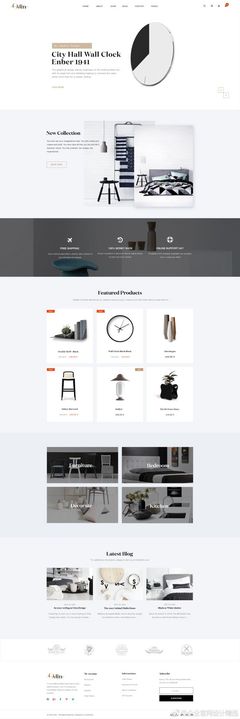
- 極簡與留白:突出產品本身。采用純凈背景、充足留白,讓沙發(fā)、燈具、儲物柜等成為視覺焦點,營造寧靜、高端的居家氛圍。適合現(xiàn)代、北歐風格品牌。
- 自然與溫暖:運用木質紋理、柔和光線、植物元素或生活場景圖,傳遞溫馨、有機的生活理念,增強情感共鳴。適合原木、田園風格商品。
- 色彩策略:主色調多選用中性色(白、灰、米色)作為背景,搭配低飽和度的輔助色(如灰藍、陶土粉),營造舒適感。關鍵促銷信息或按鈕可使用對比色引導點擊。
二、布局與導航:清晰引導與高效瀏覽
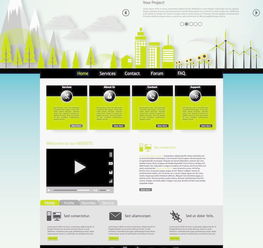
- 首屏沖擊力:采用全屏輪播圖或視頻展示主打系列,搭配簡潔有力的標語,如“重塑你的生活空間”,立即傳達品牌價值。
- 智能分類導航:除了常規(guī)的按房間(客廳、臥室)、品類(沙發(fā)、床具)分類,可增加按風格(工業(yè)風、復古風)、材質(實木、金屬)或場景(小戶型解決方案)等多維度篩選,幫助用戶快速定位需求。
- 瀑布流與網(wǎng)格布局:產品列表采用響應式網(wǎng)格設計,確保在不同設備上整齊排列。融入“無限滾動”或分頁加載,平衡瀏覽流暢性與性能。
三、產品展示:細節(jié)呈現(xiàn)與情境化體驗
- 高清視覺資產:提供多角度產品圖、細節(jié)特寫(如面料紋理、榫卯結構)、尺寸示意圖及360度旋轉視圖,彌補無法實地觸摸的缺憾。
- 情境化場景:將產品置于真實或渲染的居家環(huán)境中,通過搭配軟裝、燈具等,展示整體效果,激發(fā)用戶想象,如“這款沙發(fā)在你的客廳會怎樣?”。
- 增強現(xiàn)實(AR)集成:允許用戶通過手機攝像頭將虛擬家具放置在自己的房間中預覽效果,極大提升購買信心與趣味性,已成為高端家居電商的差異化利器。
四、交互與功能:提升轉化與用戶黏性
- 個性化推薦:基于瀏覽歷史、收藏行為,在首頁或產品頁顯示“你可能也喜歡”、“搭配購買”推薦,促進交叉銷售。
- 透明化服務信息:在產品頁顯著位置展示運費、配送時間、安裝服務、退貨政策等,減少購買疑慮。提供在線客服或設計咨詢入口,提供專業(yè)建議。
- 無縫購物流程:簡化購物車與結算步驟,支持多種支付方式。允許用戶創(chuàng)建“靈感板”或收藏列表,方便比較與分享,延長用戶停留時間。
五、技術優(yōu)化與可訪問性
- 響應式與性能:確保在手機、平板、桌面端均有完美顯示,并優(yōu)化圖片加載速度(如懶加載),避免因卡頓導致用戶流失。
- 無障礙設計:為圖片添加準確的替代文本,確保色差對比度符合標準,支持鍵盤導航,讓所有用戶都能順暢訪問。
###
優(yōu)秀的家居電商網(wǎng)頁設計,是美學、功能與技術的和諧統(tǒng)一。它不應僅僅是商品的陳列柜,更應成為一個激發(fā)靈感、提供解決方案、建立信任的沉浸式空間。通過聚焦視覺氛圍、直觀導航、情境化展示與人性化交互,品牌不僅能提升轉化率,更能構建深厚的情感連接,讓每一次點擊都向理想家居邁進一步。在不斷迭代中,關注用戶反饋與數(shù)據(jù)洞察,將使設計持續(xù)進化,真正成為品牌增長的強大引擎。